- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Un articol pentru a înțelege diferența dintre motoarele pas cu pas și servomotoarele și servomotoarele
I. Diferențele dintre motoarele pas cu pas și servomotoarele și servomotoarele
Motor pas cu pas: este semnalul impulsului electric în deplasarea unghiulară sau în deplasarea liniei părților motorului pas cu pas al elementului de control în buclă deschisă. Mai simplu spus, se bazează pe semnalul impulsului electric pentru a controla unghiul și numărul de spire. Așa că se bazează doar pe semnalul pulsului pentru a determina cât de multă rotație. Deoarece nu există senzor, unghiul de oprire se poate abate. Cu toate acestea, semnalul puls precis minimizează abaterea.
Servomotor: bazați-vă pe circuitul de control servo pentru a controla viteza motorului, prin senzor pentru a controla poziția de rotație. Deci controlul poziției este foarte precis. Și viteza de rotație este, de asemenea, variabilă.
Servo (Servo electronic): componenta principală a servo este servomotorul. Conține circuitul de control al servomotorului + set reducător. Da, servomotorul nu are un reductor. Și servo-ul are un angrenaj reducător.
În cazul unui servo limită, acesta se bazează pe un potențiometru sub arborele de ieșire pentru a determina unghiul de direcție al brațului cârmei. Controlul semnalului servo este un semnal modulat pe lățime de impuls (PWM), unde un microcontroler poate genera cu ușurință acest semnal.
II. Principiul de bază al motorului pas cu pas
Cum funcționează:
În mod normal, rotorul unui motor este un magnet permanent, iar atunci când curentul trece prin înfășurările statorului, înfășurările statorului produc un câmp magnetic vectorial. Acest câmp magnetic va determina rotorul să se rotească cu un unghi, astfel încât direcția perechii de câmpuri magnetice a rotorului va fi aceeași cu direcția câmpului magnetic al statorului. Când câmpul magnetic vectorial al statorului se rotește cu un unghi. De asemenea, rotorul se rotește cu un unghi cu acest câmp magnetic. Pentru fiecare impuls electric de intrare, motorul se rotește cu un pas unghiular înainte. Deplasarea sa unghiulară de ieșire este proporțională cu numărul de impulsuri de intrare, iar viteza de rotație este proporțională cu frecvența impulsurilor. Schimbând ordinea în care înfășurările sunt alimentate, motorul se inversează. Prin urmare, numărul și frecvența impulsurilor și ordinea alimentării înfășurărilor fiecărei faze a motorului pot fi controlate pentru a controla rotația motorului pas cu pas.
Principiul generării căldurii:
De obicei, vedeți tot felul de motoare, interne sunt miez de fier și bobină de înfășurare. Rezistența înfășurării, puterea va produce pierderi, dimensiunea pierderii și rezistența, iar curentul este proporțional cu pătratul, care este adesea denumit pierdere de cupru, dacă curentul nu este unda standard DC sau sinusoidală, va produce și pierderi armonice; miezul are efect de curent turbionar de histerezis, în câmpul magnetic alternativ va produce, de asemenea, pierderi, dimensiunea materialului, curent, frecvență, tensiune legate, ceea ce se numește pierdere de fier. Pierderile de cupru și pierderile de fier se vor manifesta sub formă de generare de căldură, afectând astfel randamentul motorului. Motorul pas în pas urmărește în general precizia de poziționare și ieșirea cuplului, eficiența este relativ scăzută, curentul este în general mai mare, iar componentele armonice sunt ridicate, frecvența curentului alternând cu viteza și schimbarea, astfel încât motoarele pas cu pas au, în general, o situație de căldură, iar situația este mai gravă decât motorul de curent alternativ general.
III. Construcția cârmei
Servo este compus în principal dintr-o carcasă, o placă de circuit, un motor de antrenare, un reductor și un element de detectare a poziției. Principiul său de funcționare este că receptorul trimite un semnal către servo, iar IC-ul de pe placa de circuit conduce motorul fără miez să înceapă să se rotească, iar puterea este transmisă brațului oscilant prin reductorul și, în același timp, detectorul de poziție trimite un semnal înapoi pentru a determina dacă a ajuns la poziționare sau nu. Detectorul de poziție este de fapt un rezistor variabil. Când servo se rotește, valoarea rezistorului se va modifica în consecință, iar unghiul de rotație poate fi cunoscut prin detectarea valorii rezistorului. Servomotor general este un fir subțire de cupru înfășurat în jurul unui rotor cu trei poli, atunci când curentul trece prin bobină va genera un câmp magnetic, iar periferia magnetului rotorului pentru a produce repulsie, care la rândul său generează forța de rotație. Potrivit fizicii, momentul de inerție al unui obiect este direct proporțional cu masa acestuia, deci cu cât masa obiectului care trebuie rotit este mai mare, cu atât forța necesară este mai mare. Pentru a obține o viteză de rotație rapidă și un consum redus de energie, servo-ul este realizat din fire subțiri de cupru răsucite într-un cilindru gol foarte subțire, formând un rotor gol foarte ușor, fără poli, iar magneții sunt plasați în interiorul cilindrului, care este motorul cupei goale.
Pentru a se potrivi diferitelor medii de lucru, există servo-uri cu design rezistent la apă și praf; și ca răspuns la diferite cerințe de sarcină, există angrenaje din plastic și metal pentru servo, iar angrenajele metalice pentru servo sunt, în general, cu cuplu mare și viteză mare, cu avantajul că angrenajele nu vor fi ciobite din cauza sarcinilor excesive. Servocele de calitate superioară vor fi echipate cu rulmenți cu bile pentru a face rotația mai rapidă și mai precisă. Există o diferență între un rulment cu bile și doi rulmenți cu bile, desigur că cei doi rulmenți cu bile sunt mai buni. Noile servo-uri FET folosesc în principal FET (Field Effect Tranzistor), care are avantajul unei rezistențe interne scăzute și, prin urmare, o pierdere de curent mai mică decât tranzistoarele normale.
IV. Principiul servo de funcționare
Din valul pwm în circuitul intern pentru a genera o tensiune de polarizare, generatorul de contactor prin reductorul pentru a conduce potențiometrul să se miște, astfel încât atunci când diferența de tensiune este zero, motorul se oprește, pentru a obține efectul servo.
Protocoalele pentru servo PWM-uri sunt toate aceleași, dar cele mai recente servo-uri care apar pot fi diferite.
Protocolul este în general: lățime de nivel înalt în 0,5 ms ~ 2,5 ms pentru a controla servo pentru a se întoarce prin diferite unghiuri.
V. Cum funcționează servomotoarele
Figura de mai jos prezintă un circuit de control al servomotorului realizat cu un amplificator operațional de putere LM675, iar motorul este un servomotor DC. După cum se poate vedea din figură, amplificatorul operațional de putere LM675 este alimentat de 15V, iar tensiunea de 15V este adăugată la intrarea în fază a amplificatorului operațional LM675 prin RP 1, iar tensiunea de ieșire a LM675 este adăugată la intrarea servomotorului. Motorul este echipat cu un generator de semnal de măsurare a vitezei pentru detectarea în timp real a vitezei motorului. De fapt, generatorul de semnal de viteză este un fel de generator, iar tensiunea sa de ieșire este proporțională cu viteza de rotație. Tensiunea de ieșire de la generatorul de semnal de măsurare a vitezei G este transmisă înapoi la intrarea de inversare a amplificatorului operațional ca semnal de eroare de viteză după un circuit divizor de tensiune. Valoarea tensiunii setată de potențiometrul de comandă a vitezei RP1 se adaugă la intrarea în fază a amplificatorului operațional după împărțirea tensiunii cu R1.R2, care este echivalentă cu tensiunea de referință.
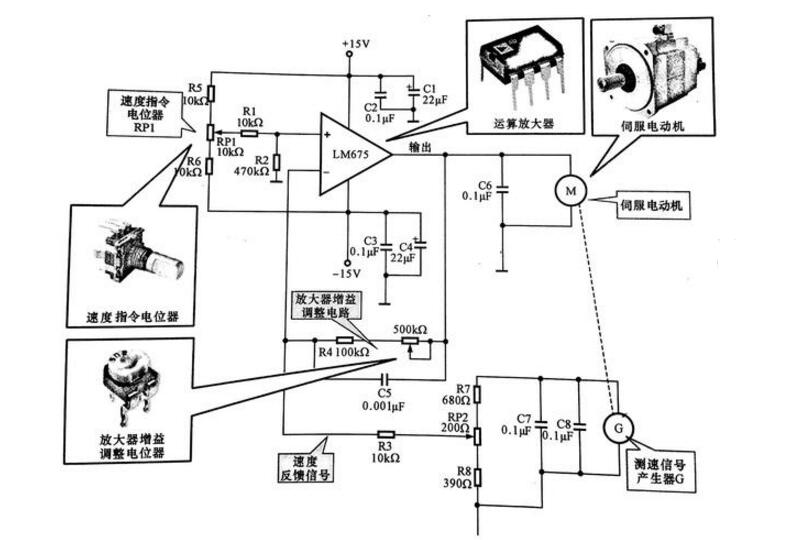
Schema de control a servomotorului
Servomotor: Indicat prin litera M pentru servomotor, este sursa de energie pentru sistemul de antrenare. Amplificatorul operațional: notat cu numele circuitului, adică LM675, este o piesă de amplificator din circuitul de control servo care furnizează curentul de antrenare pentru servomotor.
Potențiometrul de comandă a vitezei RP1: Setează tensiunea de referință a amplificatorului operațional din circuit, adică setarea vitezei. Potențiometrul de reglare a câștigului amplificatorului RP2: Folosit în circuit pentru reglarea fină a câștigului amplificatorului și, respectiv, a mărimii semnalului de feedback al vitezei.
Atunci când sarcina motorului se modifică, se modifică și tensiunea transmisă înapoi la intrarea inversată a amplificatorului operațional, adică atunci când sarcina motorului crește, viteza scade și tensiunea de ieșire a generatorului de semnal de viteză scade, astfel încât tensiunea la intrarea inversată a amplificatorului operațional scade, iar diferența dintre tensiunea de ieșire și diferența de funcționare a tensiunii de ieșire și de referință a amplificatorului operațional crește. crește. În schimb, atunci când sarcina devine mai mică și viteza motorului crește, tensiunea de ieșire a generatorului de semnal de măsurare a vitezei crește, tensiunea de feedback adăugată la intrarea inversată a amplificatorului operațional crește, diferența dintre această tensiune și tensiunea de referință scade, tensiunea de ieșire a amplificatorului operațional scade, iar viteza motorului scade în consecință, astfel încât valoarea de rotație poate fi stabilizată automat la viteza setată.